
New technologies, new application requirements, and new market segments are challenging every automotive vision program to consider and balance performance vs. cost, glass vs. hybrid, and off-the-shelf vs. custom design. Taking a platform approach at the lens component level can deliver quality optics in support of faster innovation cycles, increased manufacturability, and optimized lifetime cost and reliability at the system level.
Before we answer, how Sunex arrived at the concept of an Automotive Digital Imaging Optics Platform, we need to go back in time. During the early stages of camera integration in consumer vehicles, the only questions were if and how it could work. Oh, yes, and whether it can operate reliably over the lifetime of the car!
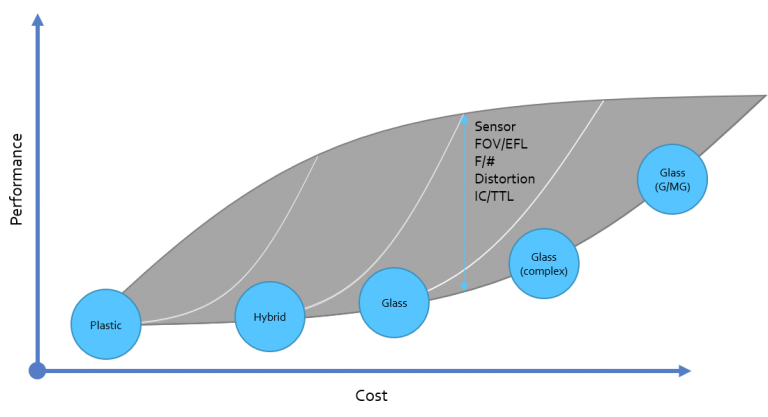
Fast forward a decade or so, the questions were answered to satisfaction and a typical project discussion often focused on balancing required performance with expected target piece price. Finding an optimum in this “2D-space” was an iterative process but typically a custom design solution was found. However, optimizing for cost or a specific performance spec is often realized through tradeoffs in other areas, moving the optimum solution from the somewhat “simpler” 2D- into a 3D- or multi-space challenge. Any decision made has to be balanced and the associated risk or impact has to be evaluated. A suggested change in Relative Illumination (RI) or MTF is probably evaluated differently depending on whether the application is purely viewing (e.g., a backup camera system,) or a safety-critical ADAS system based on computer-vision algorithms. Similarly, if you optimize for size and consider the use of an injection-molded aspherical element to reduce the TLL of the lens, that potentially increases cost and lead-time for tooling. Today, the challenges are still very much the same. However the vector space has increased, and everyone tries to increase performance, lower cost, and reduce risk. All at the same time.
Adding to the mix is the fact, that every OEM, every Tier1, and every program, has specific requirements. The most common denominator in some cases is the CMOS sensor, since every now and then, a specific type of sensor (resolution and pixel pitch), or a specific vendor PN becomes a standard. But there the similarities often also end. Multiple RFQs for the same program, though similar, have enough differences, due to existing or already chosen system components such as ISP or camera HW platform, that they require individual digital imaging optics solutions.
Over the years Sunex has developed an extensive library of proprietary lens designs that optimize the performance of digital imaging systems. We leverage our deep design and engineering experience and capabilities, and the collaborative dialogue with our client’s design teams to develop the best overall balance between performance, size, cost, and manufacturability. Using our expertise for all-glass and hybrid lens designs and our manufacturing excellence enabled us to deliver high-quality digital imaging optics in high-volume in the automotive industry.
So it all seems fine, right? Kind off; we see that cost pressure and the request for faster time-to-market continue to put pressure on the entire supply chain, and the traditional development cycles and collaboration models are potentially limiting the needed innovation. Why do we get for the same RFQ the request for HFOV of 183° from Tier1 ‘A’ and 185° from Tier1 ‘B’? Why create two completely different designs for a Surround View Camera (SVC) and an Occupant Monitoring System (OMS) for the same OEM? The reason in our opinion is based on the industry’s long-established collaboration (aka hardly any collaboration at all) model. The origin can probably be traced back to the time when OEMs completely outsourced the design and manufacturing of every single component that went into a car and merely defined system-level requirements to match the individual components as well as possible. A lot of the design and decision power went to the Tier1s and paired with fierce competition throughout the entire supply chain, it led to a sequential innovation model, limited to the requirements of a given program.
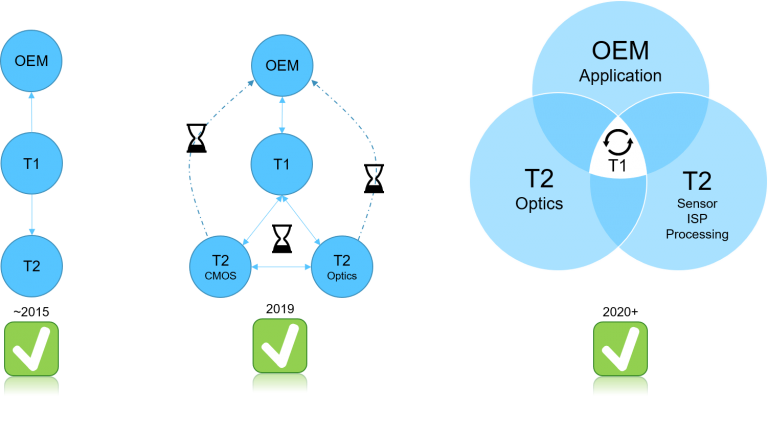
Over the last couple of years, we have all witnessed a huge growth in the number of automotive camera systems across market segments and applications. There was also a brief moment where everyone thought (or wished) that level 4 and 5 autonomy is just around the corner, and we would all soon binge-watch our favorite shows while commuting hands-free back from the office. It didn’t happen, at least not yet, but it forced the industry to rethink how to accelerate innovation. The model that emerged is somewhat collaborative, in that sense, that the Tier1 is still at the nexus but Tier2s and OEMs started to talk to each other again. Roadmap discussions and aligning future technologies and the general intent from everyone to better understand where innovations are heading are positive. Though a great improvement over the sequential model, it is still lacking the coordinated and timed effort of true collaboration.
The evolution in Sunex’s view is to move towards an agile collaboration model, where experts from OEM, Tier1, and Tier2s, come together for the appropriate amount of time to accelerate the iteration towards the best-balanced solution. Once the program boundaries and requirements are established every party can revert back into the established collaboration model to execute their individual tasks within their teams, and to allow for efficient project management and execution. As they say, “the proof is in the pudding” and we could at least get a first glimpse of how it could work recently when two large German OEMs collaborated on defining an entire automotive camera platform. It eventually failed, but the collaborative approach was the right one and we hope to see more of it in the future.
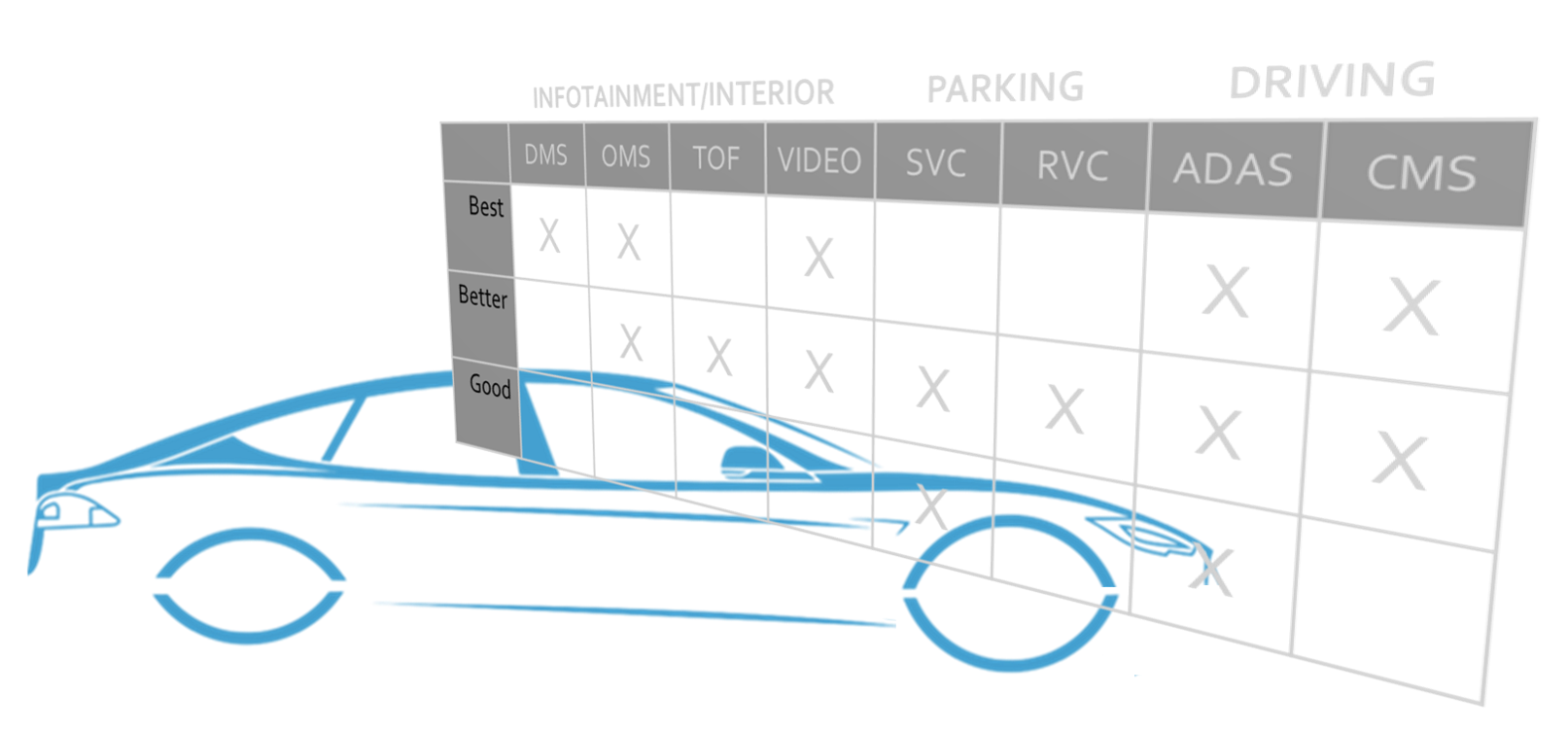
Now there it was. The industry tried to create a platform. That wasn’t necessarily the begging for Sunex, since years earlier, we already developed and promoted a lens family for specific sensor classes (e.g., the 4k, 2.1um pixel pitch automotive sensors). The basic idea is that for a given sensor class there is an available set of lenses, that have very similar lens performance parameters, but differ in one key spec such as FOV. This allows for potential standardization on a specific sensor on the Tier1 level and created confidence in expected lens performance since all members of a lens family perform similarly. This led to faster POCs, faster time-to-market, lower overall risk, and lower overall system cost through higher solution efficiency. Being fully aware, that not every market segment has the budget for a high-end solution, we used our design and manufacturing expertise to add a “good-better-best” choice to the lens family approach. This approach speaks to intentional design choices that find different solutions in the 3D-space of Performance, Cost, and Risk, that was described earlier. A practical example is our offering of FOVEA lenses for forward-looking ADAS applications that are available in different all-glass versions, but also as an automotive-grade hybrid lens solution.
If we now combine the lens family and the “good-better-best” approach, with the observation that many RFQs for the same program only differ slightly, and that some applications are very similar at their fundamental core, one can understand that the earlier discussed agile collaboration model, is the last missing piece needed, to allow for true innovation based on an Automotive Digital Imaging Optics Platform.
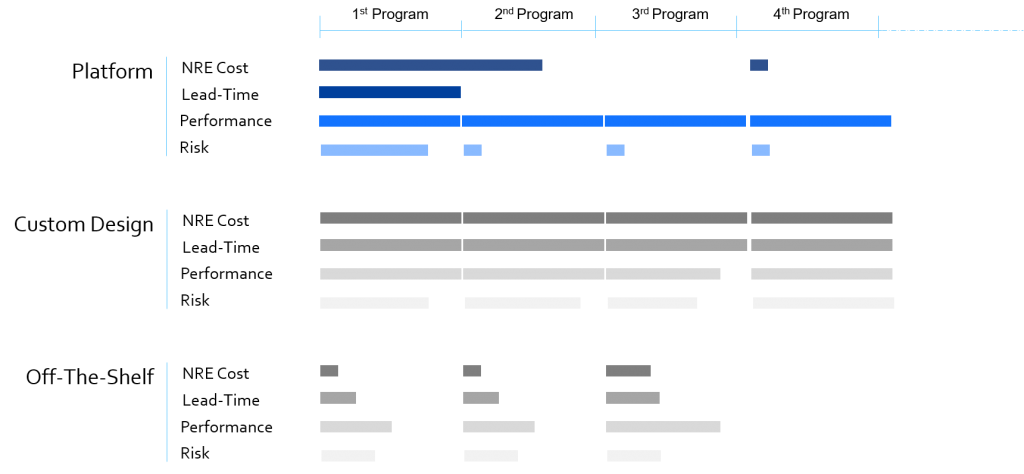
So how does the platform compare with a custom design or an off-the-shelf solution? There is the obvious disadvantage of individual custom design that every new RFQ incurs the same initial investment, lead-time, and risk. The off-the-shelf solution is often an initial request from our clients due to its perceived advantages in cost, availability, and rescued risk. However, for high-volume automotive applications, we often see that an off-the-shelf solution has simply too little alignment with the complete set of requirements, and a decision in favor of a custom solution is made.
But how can a platform compare in performance with a custom solution? The answer is strikingly simple. A complete platform has enough commonality across the platform to deliver on lower cost, faster time-to-market, and reduced risk of implementation, but enough flexibility to create a technical advantage for different applications. The right platform informs and guides future RFQs and the question of HFOV of 183° vs. 185° for the same program simply doesn’t exist anymore.
In the long run, the platform approach will always strike a better balance compared with an individual solution.
This article is based on the talk “Optimizing for All – An Optics Level Platform Approach to Automotive Vision” given by Ingo Foldvari, Sunex Director of Business Development, during the AutoSens 2019 in Brussels.